インテリジェントに走行可能なロボット搭載ミニトランスポーター「Loomo(ルーモ)」のご紹介です。
Loomo(ルーモ)
モバイルロボットコンパニオンとミニトランスポーターを合体させました。

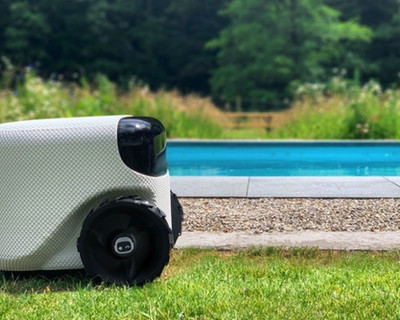
セルフバランス調整トランスポーター
スムーズでセルフバランス調整するのでどんな地形でも走行しやすく、1回のチャージで35km走行。
自動追跡のエキスパート
高度なコンピュータビジョンを使用し、あなたを自律的に追跡しながらスタビライズされたビデオを撮影。
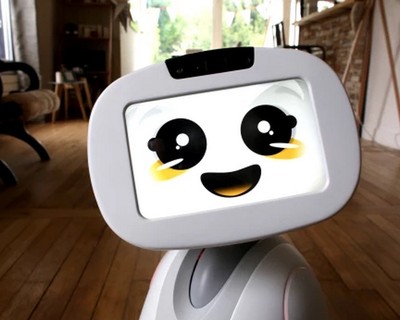
楽しくフレンドリーなロボット
愛くるしいパーソナリティと感情表現であなたを応援し、周りのみんなも楽しませます。

アバター
アプリを利用してLoomo(ルーモ)になりきって話したり、探検したり、交流したり、様々な経験が可能です。

新しいスキルを入手
継続的にソフトウェアとアプリケーションをアップデート。あなたが驚くような新機能をどんどん追加していきます。

簡単なドラッグアンドドロップインターフェースが今夏の夏にリリースされる予定です。プログラミング経験のないユーザーでも簡単にLoomo(ルーモ)にトリックを教えることが可能になります。

新しい表情をつくったり、ビデオ撮影しながら特定ルートを走行させたり、誰かがきたら玄関をチェックさせに行く、といったことが可能に。
無料Loomo Android SDK
Loomo(ルーモ)のコア機能に直接アクセスしてモビリティ+ AIプラットフォームの上に構築できます。
- ハードウェア、ソフトウェア、アルゴリズムの統合管理
- ベースアセンブリとロボットヘッドを適切な抽象度で制御
- 背面にある拡張ベイを介して、追加のハードウェアと物理的機能をロボットに取り付け
- 遊び心のある機能や実用的なソリューションの範囲を構築
BMWのセルフドライビングカーチームはLoomoと提携して自律型駐車ソリューションを開発開発しています。

モバイルロボットコンパニオン

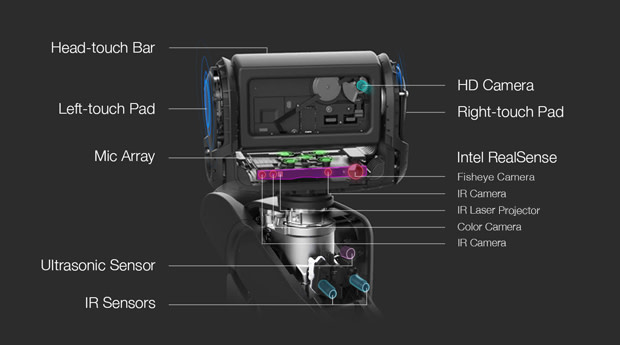
Intel RealSenseを搭載したマルチセンサー
- Intel RealSense ZR300カメラ:3D知覚、ロボットマッピング、障害物回避を可能にする奥行き感知と動作追跡を実現
- 1080p HDカメラ/ 30Hzストリーミング、104° FOV;視覚と写真/ビデオキャプチャ
- 5つのマイクロホンアレイ:音声/ノイズの方向を決定し、音声コマンドを認識
- 2つの赤外線距離センサーと超音波センサー:障害物の検出と落下警報
- その他タッチセンサー:人間とロボットとの相互作用を可能にし、別の制御方法を提供
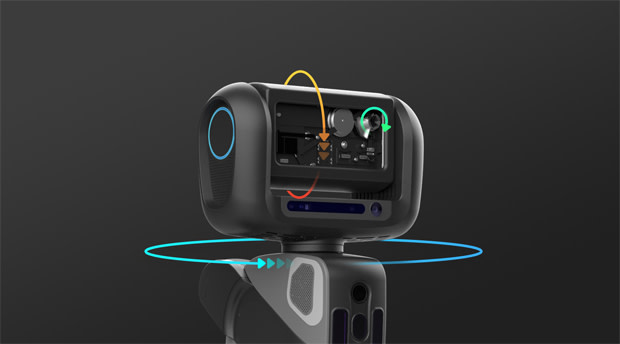
セルフスタビライジング3軸ジンバル
3軸ジンバルはHDカメラを安定させ、急激な動きや振動を中立させます。この安定性で高品質のビデオをキャプチャするだけでなく、周囲の状況をよりよく評価し、コンピュータビジョンを確立することが可能です。
視覚的知覚と理解
視覚システムは、最先端のコンピュータビジョンと深い学習技術を駆使して、DTS(Detection and Tracking System)とHUS(Human Understanding System)で構成されています。
- DTSは検出/追跡の技術を高精度で効率的に組み込むことで、Loomoは周囲を知覚し、他の多くのアプリケーションの基盤となる動く物体(人やペットを含む)を同時に追跡することが可能
- 高度な認識機能を搭載しているHUSは、顔認識を使ってユーザーを識別し、ジェスチャーを分析して行動をよりよく理解したり、ジェスチャーベースのコマンドを実行したり、フレンドリーなやり取りが可能
Robustモーションコントロールシステム
Robustモーションコントロールシステムには障害物回避/迅速な応答テクノロジーを搭載。 泥、草、隆起、斜面、およびその他の不均一な走行環境でもスムーズに走行できます。

インテリジェントなプランニング/障害回避
物理的環境の高解像度マップを構築し、通行人の行動を予期する予測モデルを生成。力学の継続的な分析を行い動きを積極的にプランニングし、周囲環境に即座に反応します。結果、経路にある様々な障害を避けながら確実に提供された目的地に移動/目標をスムーズにします。
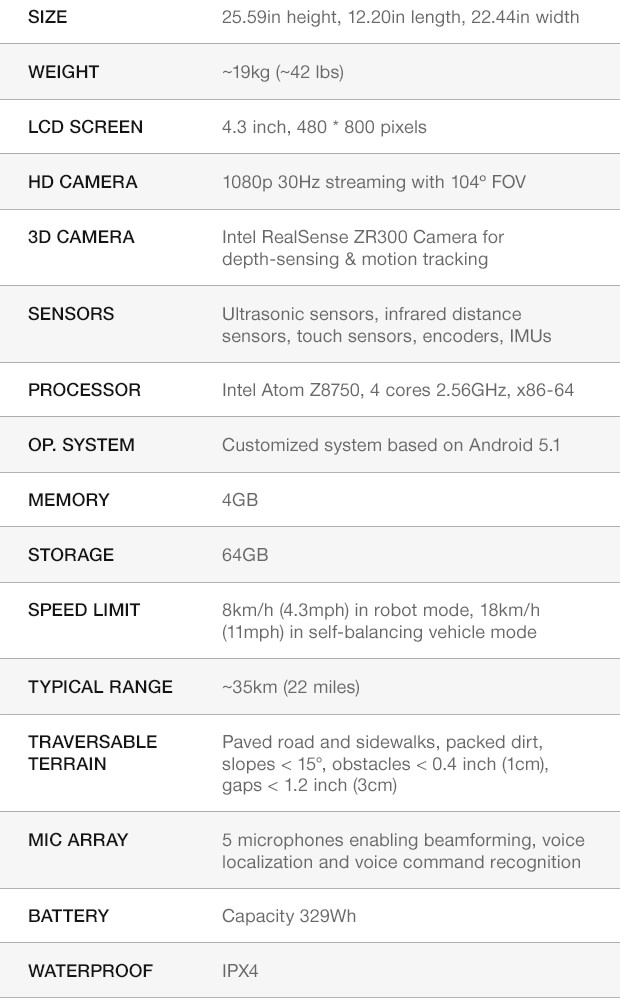
技術仕様